
Pay Attention to How You Drive: Safe and Adaptive Model-Based Reinforcement Learning for Off-Road Driving
In this project, we present a novel model-based reinforcement learning approach that combines transformer and LSTM techniques. This allows a robot to adapt to different environments while maintaining safety through Sim2Real transfer. Our approach results in an approximate 41% improvement in lap time compared to the non-adaptive baseline. The general framework consists of three main modules. The first, a transformer module, enables the robot to learn and process historical information, outputting a context vector that feeds into an LSTM module. In combination with the previous 10 state-action observations, we predict future trajectories. The trajectory is then optimized to ensure risk-awareness using MPPI, a stochastic sampling-based model predictive control (MPC).
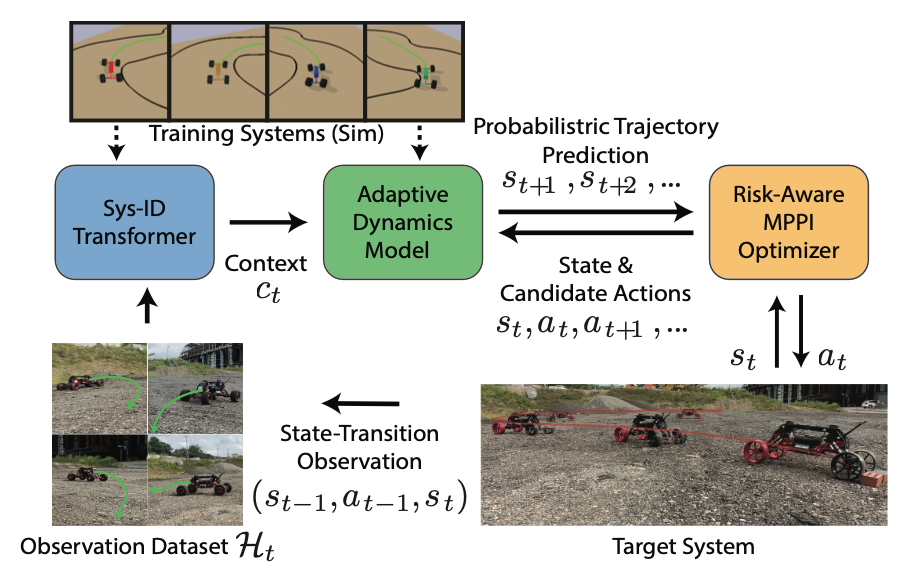
Framework
Within the project, I took on the responsibility of transferring and adding new functionalities to our code from simulation to the Robot Operating System (ROS) to help out our real-world experiments using Python. As we increased our experiment repetitions, this became a significant and stressful challenge since many problems arose from robot wear and tear to pipeline issues that lead to data collection failures. Yet I successfully managed to handle the situation and maintain iterative code implementations to meet our rapid experimental requirements and keep up team morale.
Sim2Real